- 产品中心









在智能制造与自动化技术高速发展的今天,机器人关节的精密化与可靠性已成为衡量其性能的核心指标。作为连接伺服电机与执行机构的关键部件,行星减速机凭借独特的结构设计和技术优势,正在机器人关节中扮演着不可替代的角色。其通过精密的齿轮传动系统,将电机输出的高速低扭矩转化为低速高扭矩,同时提升系统的整体刚性与运动精度,为机器人实现复杂动作提供了核心支撑。

一、动力传输的“扭矩放大器”
机器人关节的负载能力直接取决于扭矩输出效率。以工业机器人基座关节为例,其需承受机械臂自身重量及末端负载的双重作用力,传统直驱方案需配置大功率电机,但体积与成本呈指数级增长。行星减速机通过多级行星轮系结构,将电机扭矩放大至数百倍量级。例如,某重型搬运机器人采用三级行星减速设计后,300W伺服电机即可驱动50kg级负载,扭矩密度较直驱方案提升3倍以上。
这种扭矩放大效应源于行星齿轮的功率分流特性。太阳轮作为输入端,带动3-6个行星轮同步旋转,行星轮与外齿圈啮合形成多路传动路径。当外齿圈固定时,行星架作为输出端可获得减速比i=(1+Zr/Zs)(Zr为外齿圈齿数,Zs为太阳轮齿数)的扭矩输出。通过优化齿数比与级数配置,某型行星减速机在直径120mm的紧凑空间内实现了2500:1的减速比,成功应用于汽车点焊机器人基轴关节,支撑全生命周期200万次焊接任务。
二、运动精度的“微米级标尺”
在半导体晶圆搬运、医疗手术机器人等高精度场景中,关节定位误差需控制在0.1mm以内。行星减速机通过三大技术路径实现精密传动:
齿轮啮合优化:采用渐开线齿形与磨齿工艺,使齿侧间隙控制在10弧分以内。某型二级行星减速机通过热处理后的齿轮精磨,将传动误差降低至0.02°,满足3C产品装配机器人0.05mm的重复定位精度要求。
刚性结构设计:行星架与输出轴的一体化成型技术,使扭转刚度达到200Nm/arcmin以上。某物流AMR驱动轮采用大跨距轴承配置,在30°斜坡载重工况下,仍能保持0.5°以内的垂直定位精度。
误差补偿机制:多行星轮对称分布结构可自动平衡径向力,某六轴工业机器人通过动态扭矩监测系统,实时修正齿轮啮合偏差,将绝对定位精度提升至±0.03mm。
三、动态响应的“稳定器”
机器人关节在加速、减速过程中产生的惯性冲击,易导致传动系统振动与磨损。行星减速机通过以下设计实现动态稳定性:
瞬时过载能力:RV减速机衍生结构可承受200%额定扭矩的瞬时冲击,某焊接机器人采用该技术后,在10kg负载急停工况下,关节振动幅度降低60%。
低惯量匹配:行星轮系将电机转动惯量降低至直驱方案的1/5,某协作机器人通过优化齿轮质量分布,使关节启动时间缩短至0.1秒,同时将低频振动频率提升至200Hz以上,远离电机共振区间。
智能润滑系统:某新型行星减速机内置温感润滑泵,可根据负载自动调节油膜厚度,在连续8小时高负荷运行后,齿轮磨损量较传统方案减少40%。
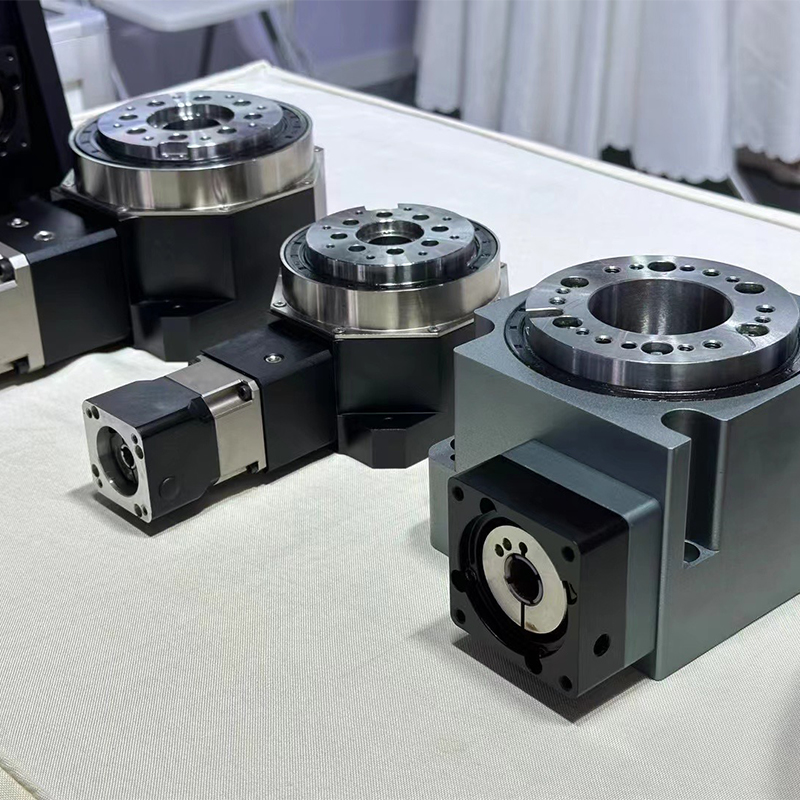
四、场景适配的“模块化方案”
不同类型机器人对减速机的需求呈现差异化特征,行星减速机通过模块化设计实现精准匹配:
工业机器人:在SCARA机器人Z轴升降模块中,某轻量化行星减速机通过铝合金箱体与中空轴设计,将重量控制在1.2kg以内,同时实现0.5°的垂直定位精度。
人形机器人:腿部关节采用低传动比行星减速机,配合高扭矩密度电机,在直径80mm空间内输出50Nm扭矩,满足双足行走的动态平衡需求。某仿生手项目通过微型行星减速机(直径<40mm)与3D打印柔轮的组合,实现了类生物肌腱的柔顺控制。
特种机器人:消防机器人驱动轮配置自锁式行星减速机组,在断电状态下可承受200kg负载不下滑;深海探测机器人采用耐腐蚀涂层与磁流体密封技术,在6000米水压环境下保持传动效率>92%。
五、技术演进的“未来图景”
随着人形机器人量产进程加速,行星减速机正面临新的技术挑战与机遇:
材料创新:陶瓷齿轮与碳纤维复合材料的应用,使某概念型减速机在保持50Nm扭矩输出的同时,重量减轻至0.8kg。
智能传感:内置扭矩传感器与振动频谱分析模块的智能减速机,可提前300小时预警齿轮磨损,将维护周期延长至3万小时。
拓扑优化:基于生成式设计的行星架结构,在同等扭矩容量下,某原型机体积缩小30%,同时将传动效率提升至96%。
据行业预测,到2030年全球精密减速器市场规模将突破500亿美元,其中行星减速机占比有望从当前的25%提升至35%。在机器人关节这个“精密舞池”中,行星减速机正以不断进化的技术姿态,演绎着动力传输与运动控制的完美协奏。从工业产线到家庭服务,从深海探测到星际漫游,这场由齿轮啮合引发的技术革命,正在重新定义人类与机器的协作边界。
产品中心
关于我们

恩坦斯特(ANDANTEX)专注精密行星减速机、伺服减速机、谐波减速机及蜗轮蜗杆减速机研发生产,提供选型、定制与自动化传动方案。